Jak to działa
AlphaCube bazuje na metodzie głębokiego uczenia z EfficientCube (TMLR'23), wprowadzając funkcje zapewniające bardziej elastyczne i potężne możliwości rozwiązywania.
Kluczowe cechy to:
- Płynny kompromis między szybkością a jakością, kontrolowany przez dostosowanie szerokości przeszukiwania.
- Ergonomiczne rozwiązywanie, które ukierunkowuje wyszukiwanie na znajdowanie rozwiązań szybszych do wykonania przez ludzkie ręce.
Te funkcje są możliwe dzięki probabilistycznej naturze metody leżącej u podstaw.
Podstawowa metoda: EfficientCube
W swej istocie AlphaCube wykorzystuje głęboką sieć neuronową (DNN) wytrenowaną do przewidywania prawdopodobieństwa, że dany ruch przybliży pomieszaną kostkę do stanu rozwiązanego. Solwer sekwencyjnie stosuje najlepsze ruchy, aby znaleźć rozwiązanie.
W praktyce, zamiast wybierać tylko jeden ruch, DNN zwraca rozkład prawdopodobieństwa dla wszystkich możliwych następnych ruchów, oceniając jakość każdego kandydata.
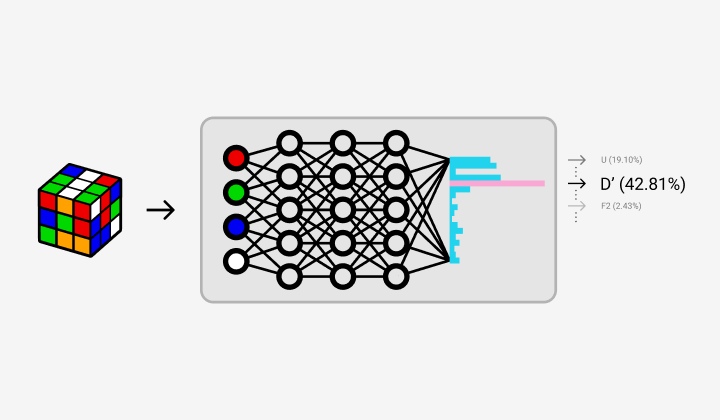
Wykorzystując te prawdopodobieństwa, solwer stosuje algorytm przeszukiwania wiązkowego (beam search) do eksploracji ograniczonego zbioru najbardziej obiecujących sekwencji ruchów. Dostosowując parametr beam_width, kontrolujesz, ile sekwencji jest eksplorowanych, co pozwala na wymianę czasu obliczeniowego na krótsze rozwiązania o wyższej jakości.
Rozwiązania optymalne pod względem szybkości
Wykorzystując probabilistyczny rdzeń, AlphaCube może znajdować rozwiązania, które są nie tylko krótkie, ale także ergonomiczne. Osiąga się to poprzez zastosowanie ergonomicznego ukierunkowania (bias).
Dostarczając słownik preferencji ruchów (ergonomic_bias), definiujesz rodzaj rozkładu pożądania. Solwer łączy to z przewidywanymi przez model prawdopodobieństwami, ukierunkowując wyszukiwanie na korzyść ruchów, które są zarówno bliskie optymalnym, jak i łatwe do wykonania, co prowadzi do minimalnego czasu wykonania.
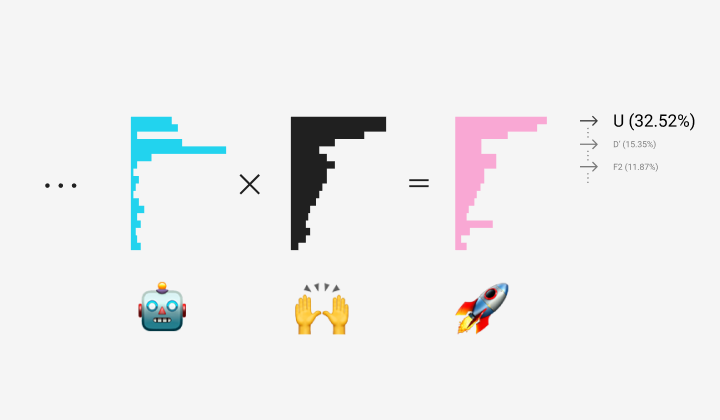
To przekształca problem wyszukiwania w znalezienie najkrótszej ścieżki na grafie ważonym, gdzie wagi krawędzi reprezentują łatwość ich wykonania. Dostosowując ukierunkowanie do swoich preferencji, otrzymujesz rozwiązania, które są nie tylko wydajne, ale naprawdę zoptymalizowane dla Twoich palców.